時間:2019-10-26 來源:互聯網 瀏覽量:
此前,青亭網曾報道過微軟一項名為Torc的VR力反饋模塊研究技術,它的特點是可以利用硬實的表麵來提供豐富的體感反饋,當用戶用兩根手指在力反饋表麵上移動的時候,能夠感受到虛擬物體的紋理和彈性,它甚至能模擬解壓球的彈性觸感。
而在近期微軟公開的三篇VR相關論文中,也曾有一篇提到了另一種可以模擬球體等虛擬物品的力反饋技術:CapstanCrunch(前兩篇參考:《不用透視功能,戴VR頭顯上街是什麼感受》和《除了注視點渲染,眼球追蹤還能做什麼》)。
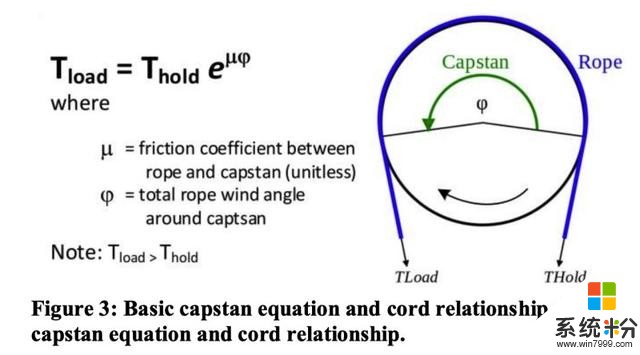
據悉,CapstanCrunch是微軟在VR力反饋領域的另一種探索,與Torc的最大不同之處在於,它不是通過堅硬的表麵來提供阻力,而是利用絞盤式定向製動係統限製手指活動的原理來模擬力反饋,這樣做的好處是可將輸入力量提高40倍,並且隻需要搭配低成本、低功耗的小型馬達,馬達並不會直接接觸到外部壓力。
(絞盤原本是船員用於控製繩子的一項工具,用在體感反饋裝置中可模擬小型內部馬達數倍的力量)
CapstanCrucnh乍一看有點類似於微軟此前研發的另一種體感反饋原型:CLAW,不過前者更加輕巧且低功耗,能夠模擬20牛頓的力反饋,除了製動係統外,還結合了離合線彈簧來提供主動的阻力反饋。

左:CLAW,右:CapstanCrunch
關於原理
微軟指出,CapstanCrunch提供力反饋的原理類似於柔道運動的理念,即:利用用戶主動施加的力量產生的反作用力,來將馬達的效率最大化。除了低功耗外,CapstanCrunch與前代技術相比,還具有低成本、穩定、安全、安靜、快速等優勢。
它基於獨特的可線性調節的摩擦式絞盤製動係統,優勢在於不需要使用大型高功率電力消耗且昂貴的致動器。

在CapstanCrunch中,力反饋是通過絞盤卷筒與繩子之間的阻力來實現的。二者之間的阻力關係可以是靜止的(靜止狀態的絞盤),也可以是動態的(絞盤旋轉),經過測試,微軟科研人員找到了一種靜態與動態阻力的差距和滯後最小的搭配方案(黏著-滑動細數小),這樣就可以讓絞盤的製動係統以線性的方式運轉。
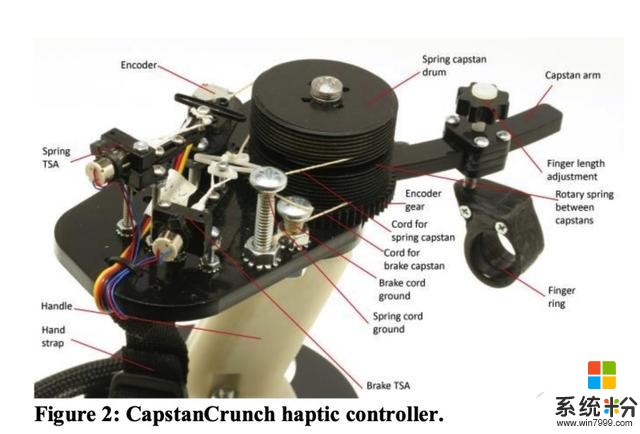
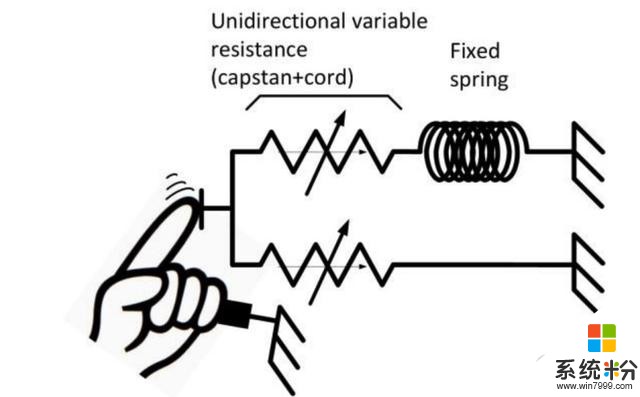
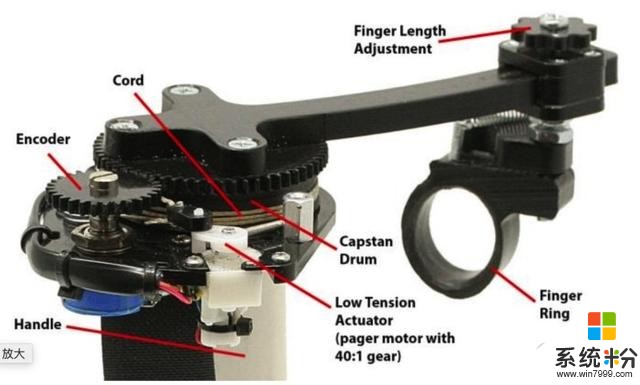
完成版CapstanCrunch原型係統采用兩個串聯的絞盤和Vectran線繩,與此同時還用了旋轉的彈簧與兩個絞盤相接,以此來生成程序可控、可塑的體感。
在CapstanCrunch力反饋係統上,還搭載了6DoF Vive追蹤器,用於追蹤用戶手部在VR場景中的位置,並通過逆向運動學在VR中模擬人手。
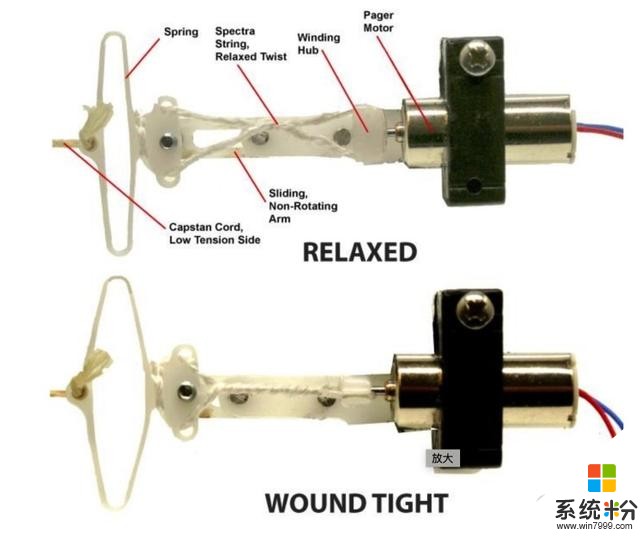
前麵曾提到,CapstanCrunch采用了線性製動係統,與大多數絞盤係統不同,它的線繩並不是根據卷筒來移動的,而是由人手來旋轉卷筒,而線繩是固定的。同時,還有一個小型的內部致動馬達會對線繩施加較小的拉力,而線繩上拉力較大的一麵則固定在手柄上。
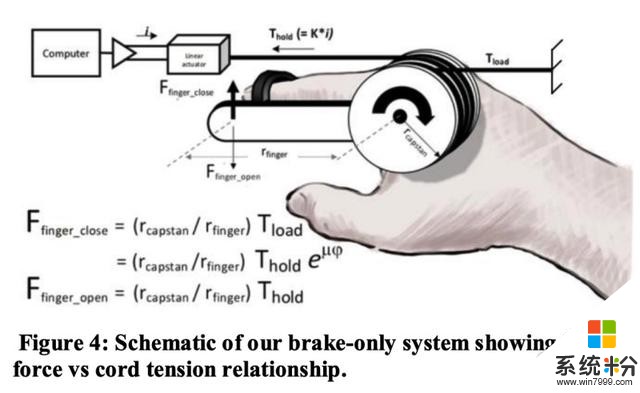
當用戶想要以逆時針方向旋轉絞盤時(手指靠近),致動器幾乎不施加拉力,而絞盤卷筒也移動更自由,沒有阻力。當致動器拉力增加的時候,卷筒會更向逆時針方向旋轉。
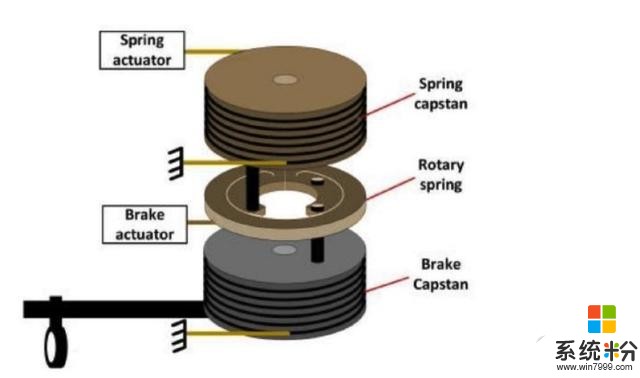
為了增加力反饋的可塑性,科研人員將CapstanCrunch在製動絞盤上通過旋轉或扭力彈簧連接了另一個絞盤,第二個絞盤的作用類似於離合器,會在合適的時間啟動彈簧。
可模擬的情境
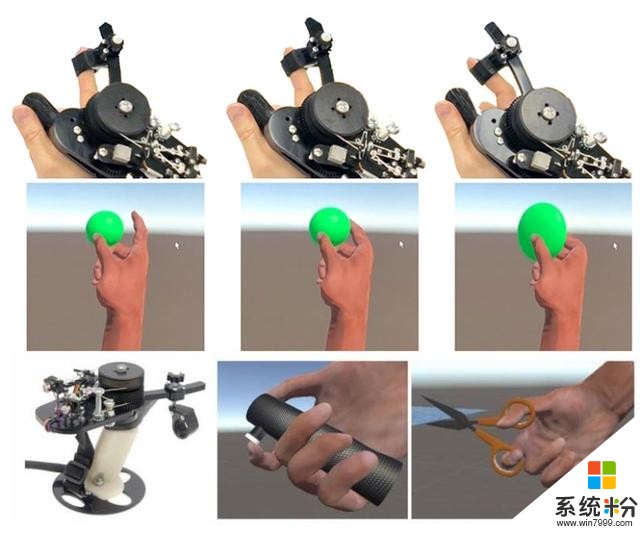
為了驗證CapstanCrunch的效果,微軟科研人員將它用於模仿4種不同的力反饋場景。除了模擬彈力球外,還可以用來模擬更複雜的按鈕、積木、剪子等交互。
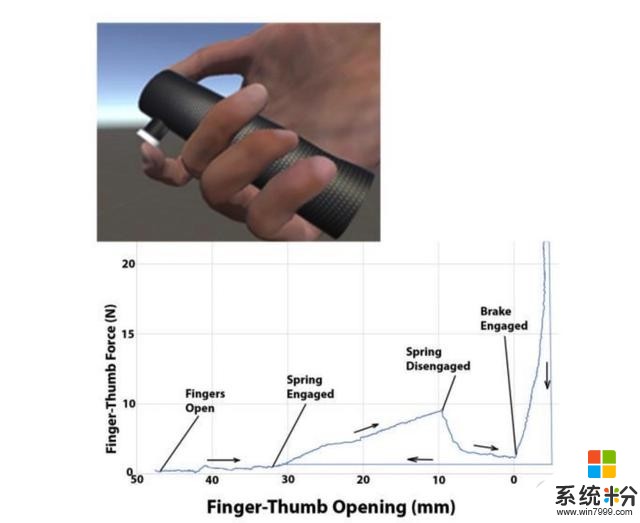
在模擬按鍵的時候,首先用戶手指會觸摸到製動係統的表麵,然後頂著彈簧的阻力繼續按壓,接著製動係統鬆開,用戶就會感覺到按按鈕的體感,再然後按鈕達到完全製動。與傳統基於彈簧的力反饋係統不同,CapstanCrunch利用彈簧與製動係統結合的方式來模擬按按鈕的動作。
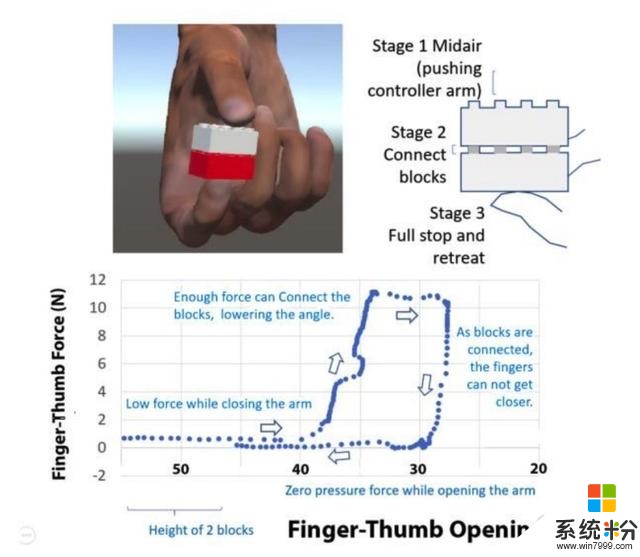
在另一個例子中,CapstanCrunch可用於模擬拚接積木的動作,這個場景分為三個步驟實現:首先,你可以通過讓兩根手指靠近來將兩塊積木拚在一起,接著,施加壓力將兩塊積木固定在一起,最後製動係統完全停止,意味著積木拚在一起了。
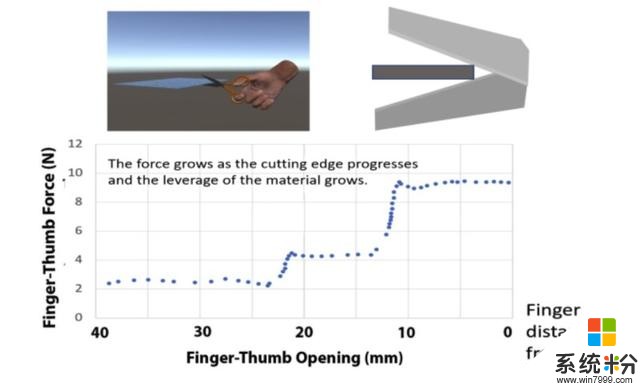
此外,CapstanCrunch也可以用於模擬用剪子剪東西的動作,通過一套離散的步驟來預估逐漸增加的力度,以此來模擬不斷增加的材質杠杆長度(也就是剪東西的效果)。
總結
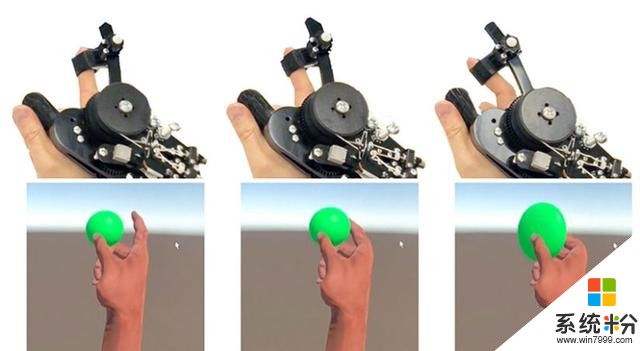
通過實驗與調查,科研人員發現CapstanCrunch在模擬半空抓取動作的時候,比此前的CLAW方案效果好得多。二者不同的是,CLAW提供的力反饋更小,不過CapstanCrunch在製動係統沒啟動的時候並沒有力反饋,而且可以適配較低端的致動器。
未來,科研人員將進一步降低CapstanCrunch元件的大小,並將絞盤和致動器的體積縮小到能夠放入手掌大小的手柄中。甚至,還有望將力反饋的範圍擴大到更多手指。此外,為了優化CapstanCrunch的觸覺反饋,預計在其中安裝一個接觸指尖的音圈致動器,並且還會在拇指的位置加入一個觸控板,用於優化手指與虛擬物體的交互。
其實,盡管CapstanCrunch采用的絞盤式力反饋方案比較少見,但是通過限製手指活動來模擬力量的方式並不是新的概念。比如,岱仕科技旗下的Dexmo手部外骨骼式力反饋手套也是通過向手指提供反作用力,來模擬真實物體的握感。